多彩大学生网,大学生三下乡投稿平台
煤矿智能巡检机器人:开启矿山安全智能化新时代
发布时间:2025-05-21 阅读: 一键复制网址
在科技飞速发展的当下,黑龙江科技大学科研团队成功研发出一款煤矿智能协作式巡检机器人,它正引领着矿山安全巡检领域的一场深刻变革。这款机器人凭借其卓越的技术创新、出色的性能表现以及强大的环境适应能力,有望彻底革新传统煤矿巡检模式,为矿山安全筑牢坚实防线。目前,该项目已引起多家煤矿企业的密切关注,成果转化前景十分乐观。
技术创新:多技术融合打造智能巡检利器
多源融合导航技术
煤矿井下环境复杂多变,GPS信号的缺失使得传统的定位导航技术难以为继。为攻克这一难题,该机器人创新性地融合了激光雷达、视觉相机与惯性测量单元(IMU),构建起一套先进的激光雷达惯性视觉里程测量系统(LIVO)。在实际工作中,激光雷达负责对周围环境进行高精度扫描,生成大量精确的点云数据,勾勒出矿井内的三维轮廓;视觉相机则敏锐地捕捉环境中的纹理信息,为机器人的视觉识别和特征提取提供丰富的细节支持;而惯性测量单元(IMU)则实时测量机器人的姿态和加速度变化,确保机器人在移动过程中的稳定性。机器人首先对激光雷达扫描中的运动失真进行精细补偿,巧妙地计算帧-映射点-平面残差,精准地感知自身与周围环境的相对位置关系。
5G+VPN通信技术
在矿井下,通信信号的微弱与不稳定一直是困扰巡检工作的难题。为确保机器人能够与地面控制中心保持实时、稳定的数据传输,该机器人采用了5G+VPN的通信方案。5G网络凭借其超高的带宽、极低的延迟以及卓越的可靠性,为机器人搭建起一条高速稳定的数据传输通道,让大量高清图像、视频以及传感器数据能够瞬间传输至地面控制中心,实现信息的无碍流通。 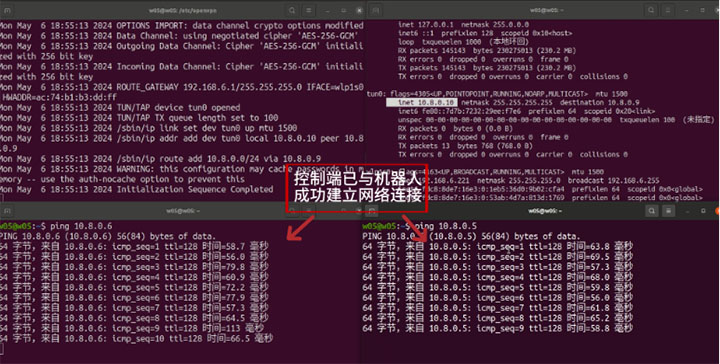 VR+数字孪生技术
VR+数字孪生技术
为了给操作人员提供一个直观、便捷且沉浸式的远程监控和操作体验,机器人配备了先进的VR+数字孪生技术。通过在VR平台下精心构建矿井的数字孪生模型,操作人员仿佛置身于矿井之中,亲身体验机器人的巡检过程。在这个高度逼真的虚拟环境中,操作人员可以360度无死角地观察矿井的每一个细节,实时获取机器人的位置、姿态、传感器数据等丰富信息,精准掌握机器人的工作状态。操作人员只需轻轻转动头部、点击按钮,就能如同在真实矿井中一样,轻松自如地对机器人进行精准控制,指挥它在巷道中穿梭、在设备间巡检、在危险区域停留检测。
创新优势:集群协作提升巡检效能  空地协同,广泛覆盖
空地协同,广泛覆盖
传统的单一功能巡检机器人在面对煤矿井下复杂多变的作业环境时,往往力不从心。为了解决这一问题,该机器人创新性地采用了空地协同工作模式,打造了一个功能强大、覆盖面广的智能巡检机器人集群。集群中包括履带式巡检机器人、变胞式空地两栖巡检机器人和工作协助机器人等多种类型,它们各司其职、相互协作,共同完成矿井巡检任务。履带式机器人配备多种高精度传感器,能够在狭窄崎岖的巷道中稳健前行,对井下设备和环境进行近距离、全方位的检测。它的履带设计使其具备强大的越障能力,无论是碎石、泥泞还是水坑,都能轻松跨越,确保巡检任务不受地形限制。
变胞设计,灵活适应
变胞式空地两栖机器人的独特设计是该机器人集群的亮点之一,它具备强大的适应性,能够轻松应对煤矿井下多变的环境条件。其模态切换系统采用了高精度数字舵机和闭环控制系统,这种先进的技术组合确保了飞行与陆地模式之间的快速、可靠切换。在飞行模式下,机器人利用螺旋桨产生的强大升力在空中飞行,能够有效避开地面的复杂障碍物,如支架、管道、积水等,快速抵达指定位置,对矿井顶部、通风口、高处设备等难以触及的区域进行全面检测;在陆地模式下,机器人则切换至轮式行驶,通过定制的外转子无刷电机驱动轮毂,实现稳定、快速的地面移动,对巷道内的地面设备、电缆、轨道等进行细致巡检。此外,机器人的机臂采用了T700碳纤维管和3K斜纹碳纤维材质轮毂的组合,既保证了结构的高强度和高刚性,又大幅减轻了自重,使机器人具备了出色的机动性和续航能力。在面对不同形状和尺寸的障碍物时,机器人可以灵活地调整机身姿态,轻松跨越或避开障碍物,继续执行巡检任务。这种变胞设计让机器人在矿井内的各种复杂环境中如鱼得水,无论是蜿蜒曲折的巷道、陡峭的斜坡,还是狭窄的通道、低矮的顶板,都能稳健前行,确保巡检工作的连续性和完整性。
性能卓越:稳定可靠的矿山安全卫士
自定位精度高
精准的自定位能力是确保机器人能够按照预设路径稳定行驶、准确执行巡检任务的关键。该机器人的陆地机器人自定位误差控制在惊人的0.01m-0.05m范围内,这一精度水平在行业内处于领先地位。在矿井下,机器人依靠其先进的多源融合导航技术,能够实时感知自身位置与周围环境的关系,精准地识别巷道的转弯、分支和设备位置等关键信息。无论是在狭窄曲折的巷道中,还是在设备林立的作业区域,机器人都能沿着预设的巡检路线稳健前行,避免因定位误差导致的巡检遗漏或重复。  飞行与陆地模式性能优异
飞行与陆地模式性能优异
变胞式空地两栖无人机在飞行模式下展现出了惊人的性能表现。即使在无GPS信号且负载2kg的复杂环境下,它依然能够实现位置漂移仅±3cm的稳定悬停,这一精度水平在全球范围内都处于领先地位。其最大飞行速度可达10.2m/s,能够在短时间内快速飞越矿井内的长距离巷道和复杂区域,大大提高了巡检效率。单次续航时间达到10分钟,足以满足矿井内大部分巡检任务的需求。在陆地模式下,机器人在平坦地面的行驶速度可达1m/s,能够稳健地行驶在巷道内,灵活躲避障碍物。其具备跨越5cm台阶的越障能力,可以轻松跨越矿井内的小型障碍物,如轨道、管道等,确保巡检任务的连续性。
团队实力:科研精英汇聚,创新成果频出
专业指导教师引领
该项目能够取得如此显著的成果,离不开黑龙江科技大学资深教授的悉心指导。这些指导教师在机器人技术、自动化控制、人工智能、机械工程等多个领域拥有深厚的专业知识和丰富的科研经验。他们长期活跃在科研一线,参与了众多国家级和省部级科研项目,发表了大量高质量的学术论文,拥有多项专利技术,是各自领域的权威专家。在项目研发过程中,指导教师们全程参与,为团队提供了全方位的技术指导和支持。从项目的选题、方案设计,到技术实现、测试优化,每一个环节都凝聚着他们的智慧和心血。  科研成果丰硕
科研成果丰硕
团队自成立以来,在各类科技创新竞赛中屡获佳绩,先后荣获国家级和省级奖项多项,充分展示了团队的创新实力和科研水平。在2024年的中国机器人及人工智能大赛中,团队凭借煤矿智能协作式巡检机器人的出色表现,一举夺得国家一等奖,这一荣誉不仅是对团队过往努力的肯定,更是对项目技术先进性和创新性的权威认可。此外,团队还在全国大学生电子设计竞赛、中国国际“互联网+”大学生创新创业大赛、“挑战杯”全国大学生科技作品竞赛等重量级赛事中多次获奖,累计获得国家级和省级奖项62项,这些荣誉见证了团队在科技创新道路上的成长与进步。  成果转化:助力煤矿企业降本增效与安全提升
成果转化:助力煤矿企业降本增效与安全提升
未来展望:引领矿山巡检智能化发展潮流
黑龙江科技大学科研团队成功研发的煤矿智能协作式巡检机器人,为矿山安全巡检开辟了一条智能化、高效化、可靠化的新路径,具有广阔的应用前景和深远的行业意义。在未来的发展中,随着技术的不断成熟和完善,煤矿智能协作巡检机器人将在更多煤矿企业中得到推广应用,为我国煤炭工业的安全生产和智能化发展注入源源不断的强大动力。可以预见,在不久的将来,这些智能机器人将成为煤矿巡检工作的主力军,承担起保障矿山安全的重要使命。
同时,该机器人的研发经验和技术成果也将为其他相关领域的智能化装备研发提供宝贵的借鉴和启示,推动智能机器人技术在工业领域的广泛应用。例如,在化工、石油、电力等行业的危险环境巡检中,类似的智能机器人技术可以得到移植和应用,为各行业的安全生产保驾护航。此外,随着人工智能、物联网、大数据等前沿技术的不断发展,煤矿智能协作巡检机器人也将持续进化,具备更强的自主学习能力、更高效的数据分析能力和更智能的决策能力,为矿山安全领域带来更多的惊喜和突破。
黑龙江科技大学科研团队将继续深耕细作,不断优化和升级煤矿智能协作巡检机器人,致力于打造更加智能、高效、可靠的矿山安全巡检解决方案。在科研团队的持续努力和煤矿企业的积极配合下,煤矿智能协作巡检机器人必将在矿山安全领域发挥越来越重要的作用,开启矿山智能巡检的新纪元,为我国的能源产业安全发展筑牢坚实防线,让矿山生产变得更加安全、智能和高效。
技术创新:多技术融合打造智能巡检利器
多源融合导航技术
煤矿井下环境复杂多变,GPS信号的缺失使得传统的定位导航技术难以为继。为攻克这一难题,该机器人创新性地融合了激光雷达、视觉相机与惯性测量单元(IMU),构建起一套先进的激光雷达惯性视觉里程测量系统(LIVO)。在实际工作中,激光雷达负责对周围环境进行高精度扫描,生成大量精确的点云数据,勾勒出矿井内的三维轮廓;视觉相机则敏锐地捕捉环境中的纹理信息,为机器人的视觉识别和特征提取提供丰富的细节支持;而惯性测量单元(IMU)则实时测量机器人的姿态和加速度变化,确保机器人在移动过程中的稳定性。机器人首先对激光雷达扫描中的运动失真进行精细补偿,巧妙地计算帧-映射点-平面残差,精准地感知自身与周围环境的相对位置关系。
5G+VPN通信技术
在矿井下,通信信号的微弱与不稳定一直是困扰巡检工作的难题。为确保机器人能够与地面控制中心保持实时、稳定的数据传输,该机器人采用了5G+VPN的通信方案。5G网络凭借其超高的带宽、极低的延迟以及卓越的可靠性,为机器人搭建起一条高速稳定的数据传输通道,让大量高清图像、视频以及传感器数据能够瞬间传输至地面控制中心,实现信息的无碍流通。
为了给操作人员提供一个直观、便捷且沉浸式的远程监控和操作体验,机器人配备了先进的VR+数字孪生技术。通过在VR平台下精心构建矿井的数字孪生模型,操作人员仿佛置身于矿井之中,亲身体验机器人的巡检过程。在这个高度逼真的虚拟环境中,操作人员可以360度无死角地观察矿井的每一个细节,实时获取机器人的位置、姿态、传感器数据等丰富信息,精准掌握机器人的工作状态。操作人员只需轻轻转动头部、点击按钮,就能如同在真实矿井中一样,轻松自如地对机器人进行精准控制,指挥它在巷道中穿梭、在设备间巡检、在危险区域停留检测。
创新优势:集群协作提升巡检效能
传统的单一功能巡检机器人在面对煤矿井下复杂多变的作业环境时,往往力不从心。为了解决这一问题,该机器人创新性地采用了空地协同工作模式,打造了一个功能强大、覆盖面广的智能巡检机器人集群。集群中包括履带式巡检机器人、变胞式空地两栖巡检机器人和工作协助机器人等多种类型,它们各司其职、相互协作,共同完成矿井巡检任务。履带式机器人配备多种高精度传感器,能够在狭窄崎岖的巷道中稳健前行,对井下设备和环境进行近距离、全方位的检测。它的履带设计使其具备强大的越障能力,无论是碎石、泥泞还是水坑,都能轻松跨越,确保巡检任务不受地形限制。
变胞设计,灵活适应
变胞式空地两栖机器人的独特设计是该机器人集群的亮点之一,它具备强大的适应性,能够轻松应对煤矿井下多变的环境条件。其模态切换系统采用了高精度数字舵机和闭环控制系统,这种先进的技术组合确保了飞行与陆地模式之间的快速、可靠切换。在飞行模式下,机器人利用螺旋桨产生的强大升力在空中飞行,能够有效避开地面的复杂障碍物,如支架、管道、积水等,快速抵达指定位置,对矿井顶部、通风口、高处设备等难以触及的区域进行全面检测;在陆地模式下,机器人则切换至轮式行驶,通过定制的外转子无刷电机驱动轮毂,实现稳定、快速的地面移动,对巷道内的地面设备、电缆、轨道等进行细致巡检。此外,机器人的机臂采用了T700碳纤维管和3K斜纹碳纤维材质轮毂的组合,既保证了结构的高强度和高刚性,又大幅减轻了自重,使机器人具备了出色的机动性和续航能力。在面对不同形状和尺寸的障碍物时,机器人可以灵活地调整机身姿态,轻松跨越或避开障碍物,继续执行巡检任务。这种变胞设计让机器人在矿井内的各种复杂环境中如鱼得水,无论是蜿蜒曲折的巷道、陡峭的斜坡,还是狭窄的通道、低矮的顶板,都能稳健前行,确保巡检工作的连续性和完整性。
性能卓越:稳定可靠的矿山安全卫士
自定位精度高
精准的自定位能力是确保机器人能够按照预设路径稳定行驶、准确执行巡检任务的关键。该机器人的陆地机器人自定位误差控制在惊人的0.01m-0.05m范围内,这一精度水平在行业内处于领先地位。在矿井下,机器人依靠其先进的多源融合导航技术,能够实时感知自身位置与周围环境的关系,精准地识别巷道的转弯、分支和设备位置等关键信息。无论是在狭窄曲折的巷道中,还是在设备林立的作业区域,机器人都能沿着预设的巡检路线稳健前行,避免因定位误差导致的巡检遗漏或重复。
变胞式空地两栖无人机在飞行模式下展现出了惊人的性能表现。即使在无GPS信号且负载2kg的复杂环境下,它依然能够实现位置漂移仅±3cm的稳定悬停,这一精度水平在全球范围内都处于领先地位。其最大飞行速度可达10.2m/s,能够在短时间内快速飞越矿井内的长距离巷道和复杂区域,大大提高了巡检效率。单次续航时间达到10分钟,足以满足矿井内大部分巡检任务的需求。在陆地模式下,机器人在平坦地面的行驶速度可达1m/s,能够稳健地行驶在巷道内,灵活躲避障碍物。其具备跨越5cm台阶的越障能力,可以轻松跨越矿井内的小型障碍物,如轨道、管道等,确保巡检任务的连续性。
团队实力:科研精英汇聚,创新成果频出
专业指导教师引领
该项目能够取得如此显著的成果,离不开黑龙江科技大学资深教授的悉心指导。这些指导教师在机器人技术、自动化控制、人工智能、机械工程等多个领域拥有深厚的专业知识和丰富的科研经验。他们长期活跃在科研一线,参与了众多国家级和省部级科研项目,发表了大量高质量的学术论文,拥有多项专利技术,是各自领域的权威专家。在项目研发过程中,指导教师们全程参与,为团队提供了全方位的技术指导和支持。从项目的选题、方案设计,到技术实现、测试优化,每一个环节都凝聚着他们的智慧和心血。
团队自成立以来,在各类科技创新竞赛中屡获佳绩,先后荣获国家级和省级奖项多项,充分展示了团队的创新实力和科研水平。在2024年的中国机器人及人工智能大赛中,团队凭借煤矿智能协作式巡检机器人的出色表现,一举夺得国家一等奖,这一荣誉不仅是对团队过往努力的肯定,更是对项目技术先进性和创新性的权威认可。此外,团队还在全国大学生电子设计竞赛、中国国际“互联网+”大学生创新创业大赛、“挑战杯”全国大学生科技作品竞赛等重量级赛事中多次获奖,累计获得国家级和省级奖项62项,这些荣誉见证了团队在科技创新道路上的成长与进步。
未来展望:引领矿山巡检智能化发展潮流
黑龙江科技大学科研团队成功研发的煤矿智能协作式巡检机器人,为矿山安全巡检开辟了一条智能化、高效化、可靠化的新路径,具有广阔的应用前景和深远的行业意义。在未来的发展中,随着技术的不断成熟和完善,煤矿智能协作巡检机器人将在更多煤矿企业中得到推广应用,为我国煤炭工业的安全生产和智能化发展注入源源不断的强大动力。可以预见,在不久的将来,这些智能机器人将成为煤矿巡检工作的主力军,承担起保障矿山安全的重要使命。
同时,该机器人的研发经验和技术成果也将为其他相关领域的智能化装备研发提供宝贵的借鉴和启示,推动智能机器人技术在工业领域的广泛应用。例如,在化工、石油、电力等行业的危险环境巡检中,类似的智能机器人技术可以得到移植和应用,为各行业的安全生产保驾护航。此外,随着人工智能、物联网、大数据等前沿技术的不断发展,煤矿智能协作巡检机器人也将持续进化,具备更强的自主学习能力、更高效的数据分析能力和更智能的决策能力,为矿山安全领域带来更多的惊喜和突破。
黑龙江科技大学科研团队将继续深耕细作,不断优化和升级煤矿智能协作巡检机器人,致力于打造更加智能、高效、可靠的矿山安全巡检解决方案。在科研团队的持续努力和煤矿企业的积极配合下,煤矿智能协作巡检机器人必将在矿山安全领域发挥越来越重要的作用,开启矿山智能巡检的新纪元,为我国的能源产业安全发展筑牢坚实防线,让矿山生产变得更加安全、智能和高效。
作者:多彩大学生网 来源:多彩大学生网
扫一扫 分享悦读
- 煤矿智能巡检机器人:开启矿山安全智能化新时代
- 在科技飞速发展的当下,黑龙江科技大学科研团队成功研发出一款煤矿智能协作式巡检机器人,它正引领着矿山安全巡检领域的一场深刻变革。
- 05-21

- 浙江工商大学食品与生物工程学院开展“心廉心,清风行”校园清廉文化宣传志愿活动
- 近期,浙江工商大学食品与生物工程学院绿色先锋青年志愿服务队以“心廉心,清风行”为主题,开展系列校园清廉文化宣传志愿活动。
- 05-21

- 龚向胜博士团队赴玉屏郭家湾村开展冷浸田综合种养模式调研
- 在乡村振兴战略与农业绿色转型的推动下,稻田种养结合模式正成为农业提质增效的新引擎。
- 05-20

- 屏间流转花鼓韵,荆楚寻芳启新章 ――“寸影花鼓”团队赴郑州小学开展校园宣讲实践
- 当前,作为国家级非遗的花鼓戏面临着受众老龄化、传承人才断层、传播渠道单一等诸多困境,部分剧目面临失传危机,生存空间不断萎缩。
- 05-20

- 筝舞蓝天,心随梦飞――外国语学院开展风筝文化主题活动
- 5月15日下午,江苏科技大学外国语学院Just Service义工站联合心理协会,在教学楼与东操场举办“筝舞蓝天,心随梦飞”风筝文化主题活动
- 05-19

- 漆扇轻摇传雅韵,双语添彩谱新篇――外国语学院联合公寓中心打造沉浸式非遗文化体验
- 5月16日上午,外国语学院Just Service义工站携手后勤集团党委公寓中心党支部举办的“手作漆扇・对话夏天”主题文化活动在“语思”一站
- 05-19

- 追寻历史足迹 传承红色基因――“追寻历史坐标,接捧初心使命”实践团队泰州行
- 为深入挖掘泰州本地革命历史资源,探索泰州历史文化传承与红色文化推广的创新路径
- 05-19
- 中华传统美德的社会性实现――养老服务创新性发展
- 本论文聚焦于中华传统美德在养老服务领域的创新性发展。通过剖析当前养老服务现状,明确中华传统美德在其中的价值需求。
- 05-19
-
大学生三下乡投稿平台